About Me
I am a Master's student at the University of Chinese Academy of Sciences, based at the Shenzhen Institute of Advanced Technology (SIAT), advised by Prof. Can Wang and Prof. Xinyu Wu. I received my B.Eng. degree in Agricultural Mechanization and Automation from South China Agricultural University, where I ranked first in my cohort under the supervision of Prof. Zhiyan Zhou and Academician Prof. Xiwen Luo.
My research interests lie in mobile robotics, embedded systems, autonomous driving, and embodied intelligence, with a particular emphasis on human–computer interaction (HCI) and human–robot interaction (HRI). I also explore reinforcement learning as a means to enable adaptive decision-making and improve robot autonomy. I have a strong track record of translating theoretical foundations into practical robotic platforms and real-world experiments, demonstrating both technical depth and interdisciplinary collaboration skills.
Education
University of Chinese Academy of Sciences (UCAS)
- GPA: 3.77/4.0
- Admitted through Postgraduate Recommendation Program (Tuition-Waiver Scholarship)
South China Agricultural University (SCAU)
- GPA: 4.31/5.0 (Major Rank: 1st)
- Double First-Class University Initiative Institution
Awards
- National Scholarship for Undergraduates - Ministry of Education of China (Oct 2020)
- Academic Excellence Scholarship - University of Chinese Academy of Sciences (2023)
- First-Class Scholarship - South China Agricultural University (2021–2022)
- IEEE ICRA 2024 RoboMaster University Sim2Real Challenge - Second Prize (June 2024)
- 21st National Collegiate RoboMaster Competition - Super Confrontation - National First Prize (Aug 2022)
- 21st National Collegiate RoboMaster Competition - University League (Automated Infantry) - First Prize (Nov 2022)
- 16th National University Smart Car Competition - iFlytek Smart Restaurant Group - National First Prize (Aug 2021)
- Guangdong Provincial Collegiate Electronic Design Contest - Provincial First Prize (Oct 2020)
Projects
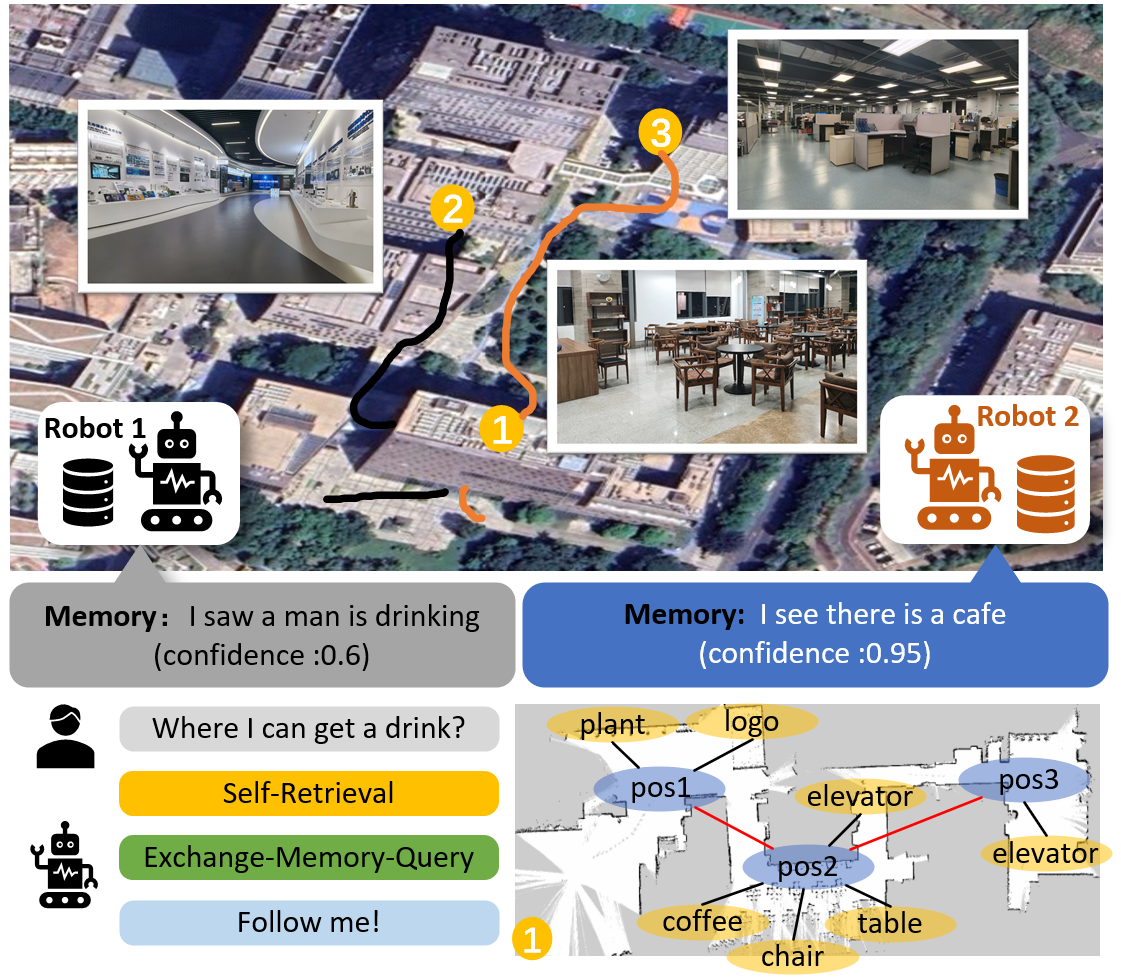
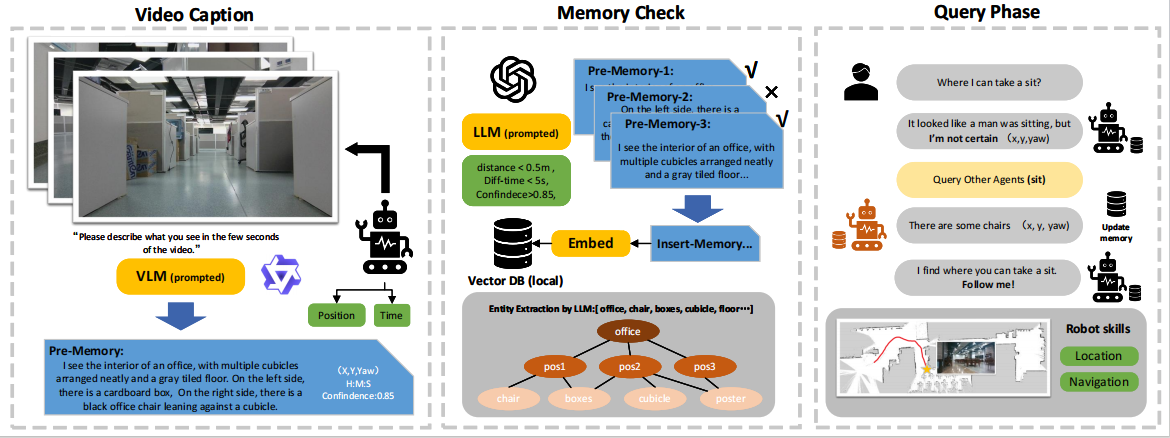
Remember-Together: Multi-Robot Collaborative VLN Framework
- Proposed a distributed multi-robot framework for constructing long-term collaborative memory to enhance vision-language navigation (VLN) in complex indoor environments.
- Designed a probabilistic spatio-temporal consistency verification algorithm to suppress hallucinations from vision–language models (VLMs) via confidence- and similarity-based filtering.
- Developed a spatial–semantic memory graph structure organizing episodic data into object–place–event nodes for efficient retrieval and reasoning.
Key Technologies: Multi-Robot Systems, Vision-Language Navigation (VLN), VLMs, Probabilistic Algorithms, Spatio-Temporal Reasoning, Semantic Memory Graphs
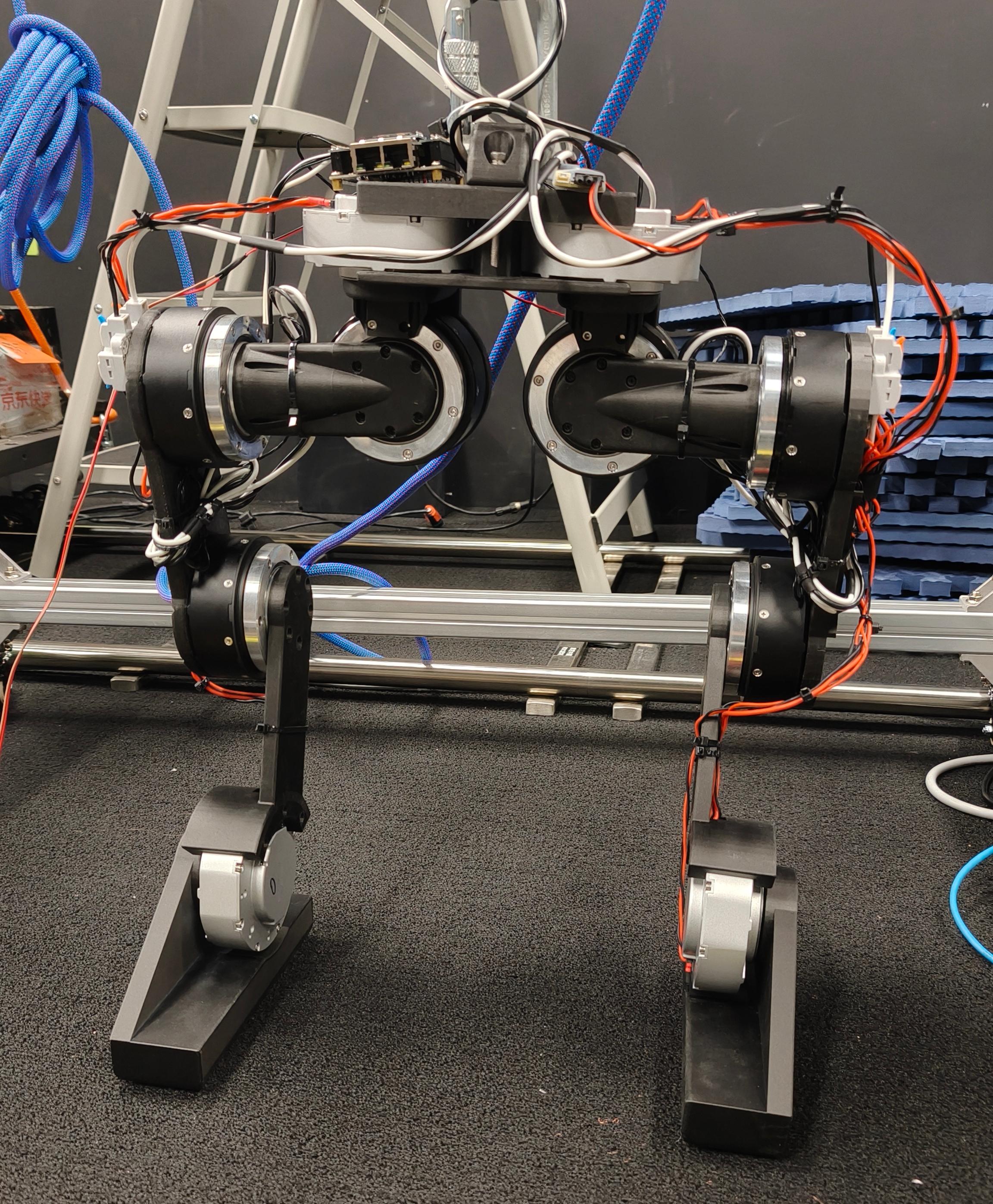
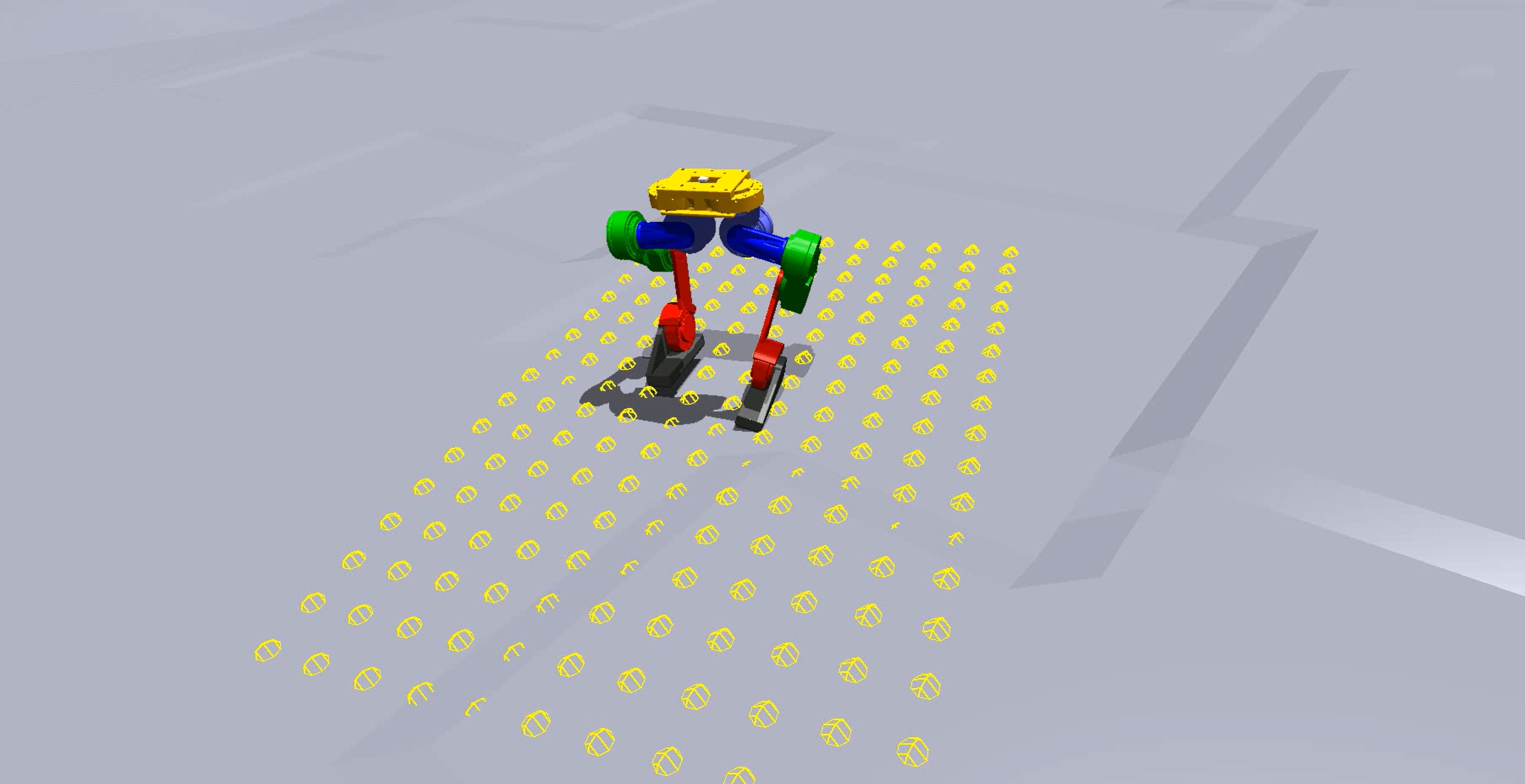
Legged Robot Lower-Level System Development
- Designed and developed lower-level control system for legged robots, including multi-joint motor and servo control based on STM32F407.
- Responsible for PCB hardware design of driver boards with CAN, high-speed RS485, and EtherCAT communication protocols.
- Engaged in dynamics modeling, reinforcement learning for motion control, and Sim2Real deployment within the Isaac Lab environment.
- Implemented safety features such as online disconnection-reconnection detection, emergency power-off, and power monitoring systems.
Key Technologies: STM32F407, PCB Design, CAN, RS485, EtherCAT, Reinforcement Learning, Sim2Real, Robotics Control
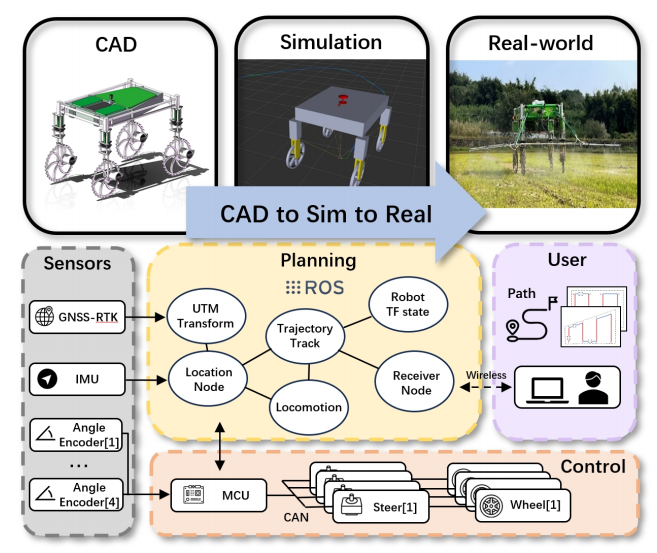
4WD-4WS Autonomous Sprayer Navigation Control System
- Led development of an agricultural sprayer with RTK-GPS & IMU for autonomous row shifting and path tracking.
- Constructed 8-DOF chassis kinematic model and implemented PID trajectory tracking.
- Designed embedded controller and CAN/USB communication system.
- Achieved "Excellent" project completion, 1 software copyright, 1 EI paper.
Key Technologies: RTK-GPS, IMU, PID Control, Kinematic Modeling, CAN Bus, STM32, C/C++



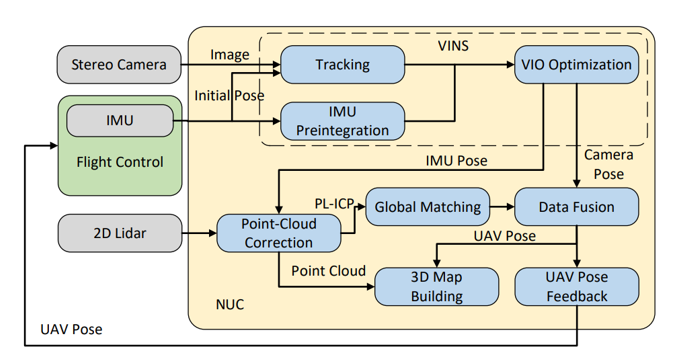
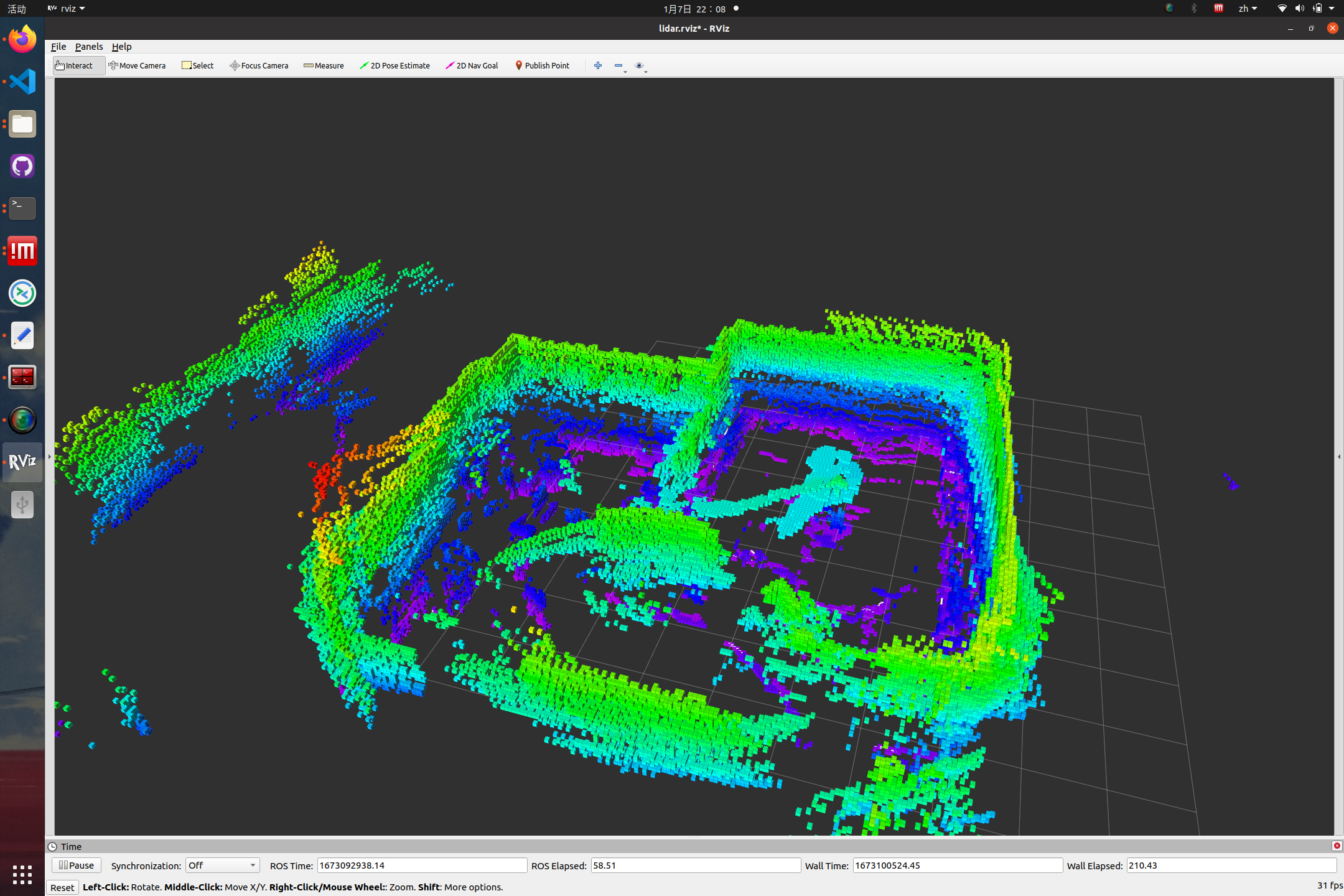
Indoor Autonomous Quadrotor UAV System with RGBD & LiDAR Fusion
- Developed VIO localization using an RGBD camera for robust indoor positioning.
- Implemented precise UAV indoor position control based on VIO data.
- Integrated single-line LiDAR for basic navigation and 3D environmental reconstruction.
- Managed UAV hardware selection, integration, and assembly.
- Deployed and calibrated VINS; compared VIO algorithms (ORB-SLAM2, VINS-Mono).
- Engineered LiDAR point cloud projection and constructed occupancy grid maps.
Key Technologies: ROS, UAV, RGBD Camera, LiDAR, VIO, SLAM (VINS-Mono, ORB-SLAM2), 3D Reconstruction, PX4, C++


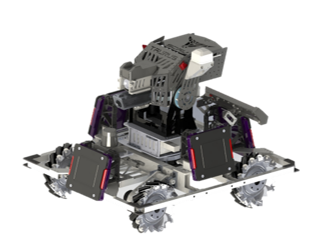
Autonomous Infantry Robot Development (RoboMaster Competition)
- Led navigation group for autonomous infantry robot in RoboMaster AI Challenge.
- Implemented full-field localization & navigation using Mecanum wheel odometry, IMU, LiDAR.
- Utilized computer vision for enemy armor detection and autonomous engagement.
- Built ROS-based software architecture, Gazebo simulation, and hardware/software communication.
- Optimized navigation with tf-transform-based "small-gyro" trajectory following and obstacle avoidance.
Key Technologies: ROS, Gazebo, SLAM, Path Planning, Computer Vision, Mecanum Wheels, C++, Python, LiDAR, IMU

National University Smart Car Competition
- Captain (2021, iFlytek Smart Restaurant): Led Mecanum wheel robot development; implemented indoor localization & multi-task allocation (QR, target detection) using LiDAR & IMU; built ROS-based multi-task scheduling.
- Member (2020, Outdoor Opto-Electronic): Contributed to Ackermann steering car for indoor localization & path planning using LiDAR, IMU, odometry; designed embedded controller.
Key Technologies: ROS, Path Planning, State Machines, Embedded Control, LiDAR, IMU, C/C++



Experience
SONY (CHINA) CO., LTD SHENZHEN BRANCH (RDC-Shenzhen)
DJI (RoboMaster)
Publications
A Biomimetic 4WS–4WD Robotic Platform with Single-Neuron PID Control for Autonomous Field Navigation
IEEE ROBIO 2025
A Real-time Framework for UAV Indoor Self-Positioning and 3D Mapping Base on 2D Lidar, Stereo Camera and IMU
IEEE RCAR 2023